RoboDisco
1Basis, 2University of Cambridge, 3The Alan Turing Institute, 4Princeton University, 5Cornell University
Robot Model Discovery Benchmark — embodied world-model learning and causal discovery
 Ants
Ants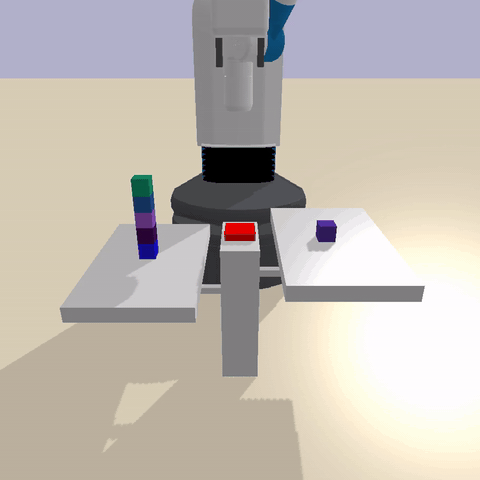 Balance
Balance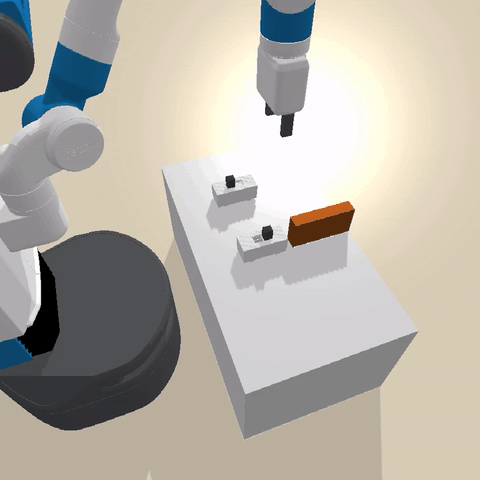 Barrier
Barrier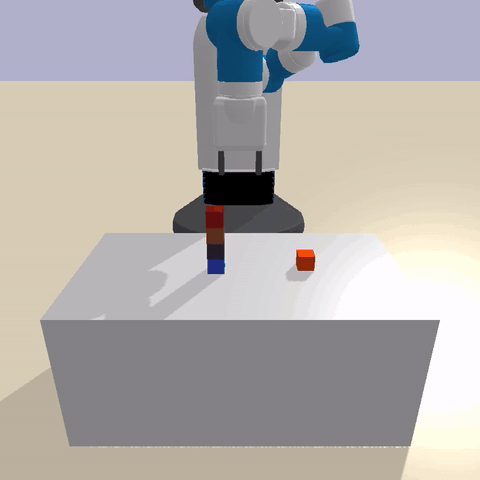 Blocks
Blocks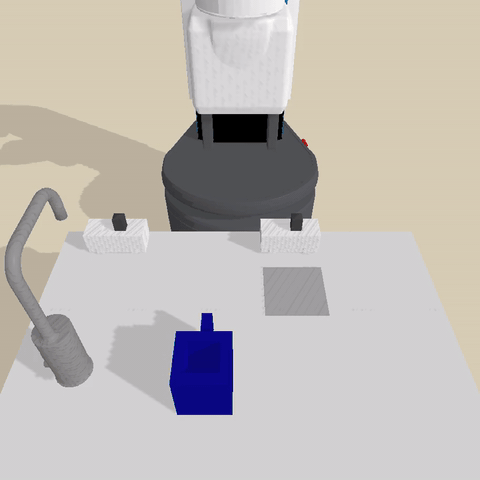 Boil
Boil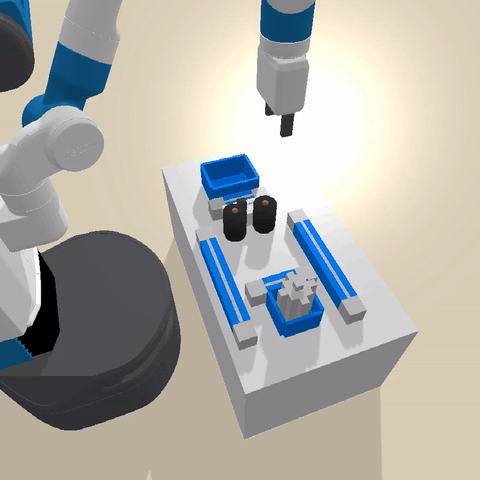 Circuit
Circuit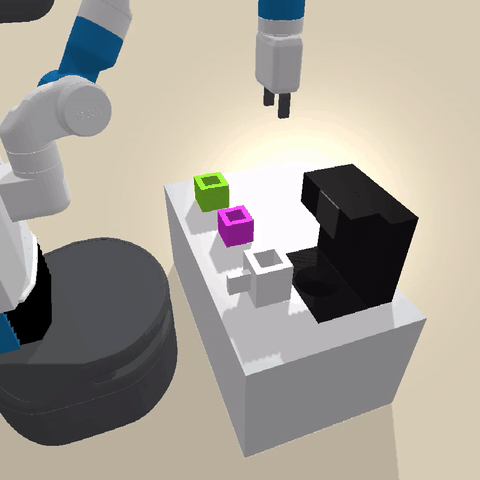 Coffee
Coffee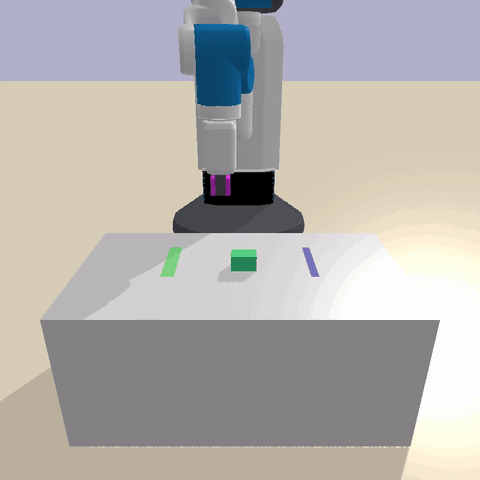 Cover
Cover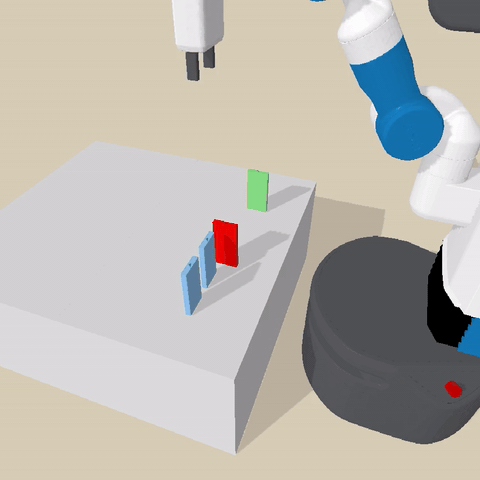 Domino
Domino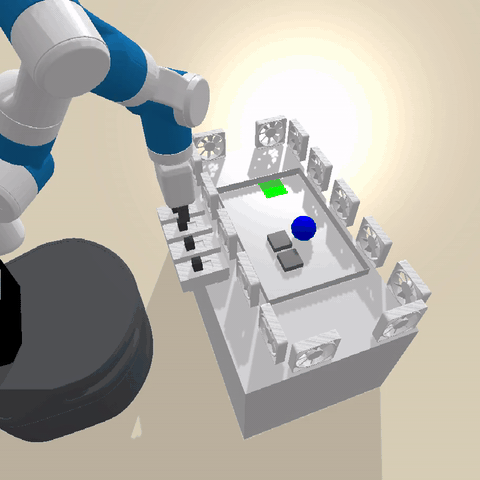 Fan
Fan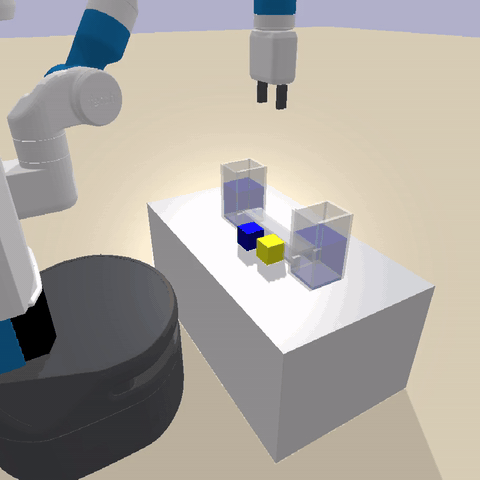 Float
Float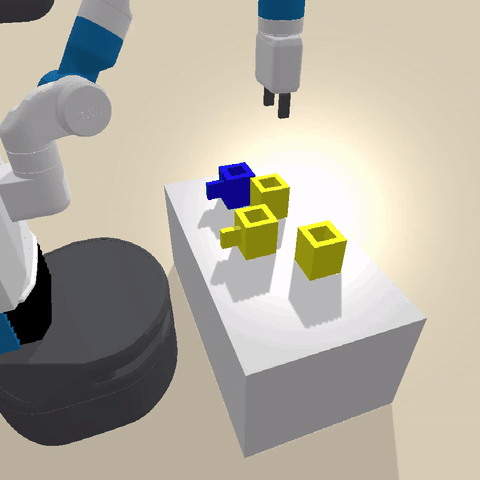 Grow
Grow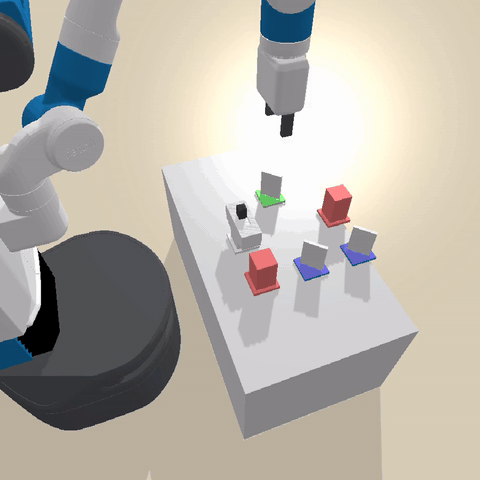 Laser
Laser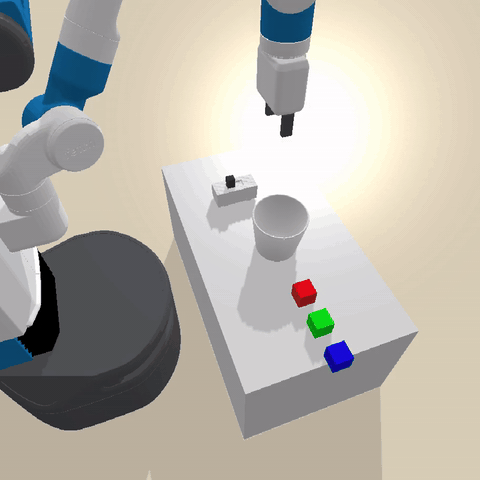 Magic Bin
Magic Bin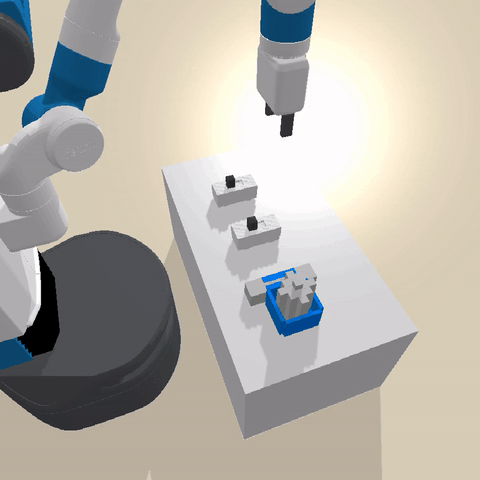 Switch
SwitchAbout
Embodied World Model Learning
RoboDisco (Robot Model Discovery Benchmark) is a benchmark suite for embodied world-model learning and causal discovery. It targets agents that must autonomously discover how their environment works — learning predictive models, identifying causal relationships between actions and outcomes, and forming abstractions that support planning and generalization.
The benchmark is developed as part of the MARA (Modeling, Abstraction, Reasoning, and Action) project, which aims to build agents capable of scientific reasoning about novel environments.
The suite comprises a diverse set of 3D robotic manipulation environments built on PyBullet, each presenting distinct challenges for world model learning. A Fetch robot must interact with various objects — from stacking blocks and pouring liquids to completing circuits and redirecting lasers — requiring agents to discover diverse physical and causal phenomena such as contact mechanics, fluid dynamics, electrical connectivity, and chain reactions.
Environments
Task Suite
Ants
Sort food by separating those that attract ants from those that do not
Balance
Activate the balance machine by pressing the button when the blocks on both sides are equal
Barrier
Barriers that can rise and fall
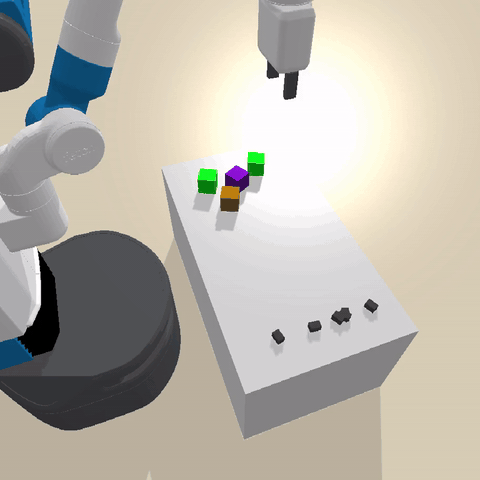
Blocks
Stack blocks into specified configurations
Boil
Boil jugs of water
Circuit
Light up the bulb by completing the electrical circuit
Coffee
Fill the cups with coffee by plugging in the power cord, filling the jug with coffee and pouring
Cover
Pick and place blocks onto target regions
Domino
Hit the red targets by pushing green blocks and strategically placing blue blocks and yellow pivots
Fan
Guide the ball to the target by controlling the fans
Float
Retrieve the floating block by raising the water level using heavy blocks
Grow
Grow plants in pots by pouring fertilizer from jugs of the same color
Laser
Hit the red targets with the laser by placing mirrors that can either reflect or reflect + pass the beam
Magic Bin
A magic bin that can make objects inside disappear
Switch
The effect of a switch changes depend on some hidden state